事件相机图像重构:浅谈Time-Surface
事件相机简介
事件相机只输出亮度变化超过一定阈值的像素坐标、时间戳与极性。因为事件流是异步产生的,与传统的固定事件曝光的图像相比富含更时空信息,所以将事件流转换为图像帧的算法至关重要,选对了算法就能发挥事件相机的高时间分辨率优势。事件相机与传统的高速相机相比,输出的事件流中不含冗余的背景图像信息,事件流只输出亮度变化超过阈值的运动物体的信息,这是我们感兴趣的,因此提高了处理速度,降低了数据量,避免使用过多的硬件资源,更利于实时计算。
事件相机的一般输出形式是事件流,事件流可以表示成如下的形式:
$ev_i=[\mathbf{x_i},t_i,p_i]^T,\quad i\in\mathbb{N},$
$ev_i$是第i个事件,其坐标为$\mathbf{x_i}=[x_i,y_i]^T$
时间戳$t_i$,极性$ p_{i}\in{-1,1}$,-1表示OFF事件,1表示ON事件
像素异步生成事件,形成时空点云,代表对象的空间分布和动态行为。 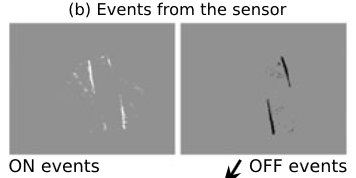
Time-Surface[1]
Time-Surface 是一种重构事件流的方法,它将事件流转换为图像帧,使得事件流的信息可以用传统的计算机视觉算法处理. Time-Surface 的核心思想是将事件流的时间信息转换为空间信息,将事件流的时间戳$t_i$转换为像素的灰度,这样就可以将事件流转换为图像帧。[1]
以 $\mathbf{x_i}=[x_i,y_i]^T$ 为中心的一个 $2R+1\times2R+1$ 的窗口: 可以表示为: $ T_i(\mathbf{u},p)=\max_{j\leq i}{t_j|\mathbf{x_j}=(\mathbf{x_i}+\mathbf{u}),p_j=p} $
其中 $T_i(\mathbf{u},p)$ 是 time-context,时间上下文
$\mathbf{u}=\begin{bmatrix}u_x,u_y\end{bmatrix}^T$ 是窗口中的像素, $u_x\in{-R,\ldots,R}$ $u_y\in{-R,\ldots,R}$
Time-Surface 中的每个像素的灰度值度是时间值的编码:亮像素显示最近的活动,而暗像素接收过去更远的事件(为了清楚起见,图中仅表示与 OFF 事件相对应的时间值) 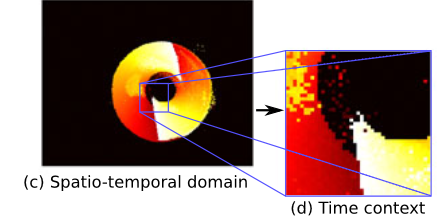 $\mathcal{S}_i(\mathbf{u},p)$ 是 $ev_i$ 附近的的 time-surface: $\mathcal{S}_i(\mathbf{u},p)=e^{-(t_i-\mathcal{T}_i(\mathbf{u},p))/\tau}$ Time-Surface 提供了动态的时空上下文信息,指数衰减系数扩展了时间邻域中的信息
$\mathcal{S}_i(\mathbf{u},p)$ 是 $ev_i$ 附近的的 time-surface: $\mathcal{S}_i(\mathbf{u},p)=e^{-(t_i-\mathcal{T}_i(\mathbf{u},p))/\tau}$ Time-Surface 提供了动态的时空上下文信息,指数衰减系数扩展了时间邻域中的信息 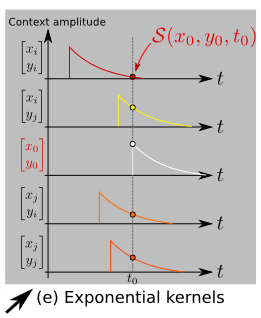 三维视角下的 Time-Surface:
三维视角下的 Time-Surface: 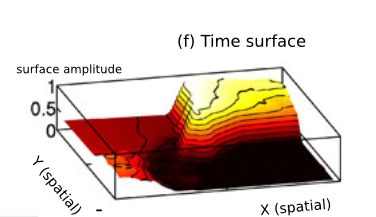
Time-Surface Prototypes
为了构建整个平面而不是窗口的局部 Time-Surface, 这里使用 incremental clustering process (增量聚类)生成 Time-Surface. 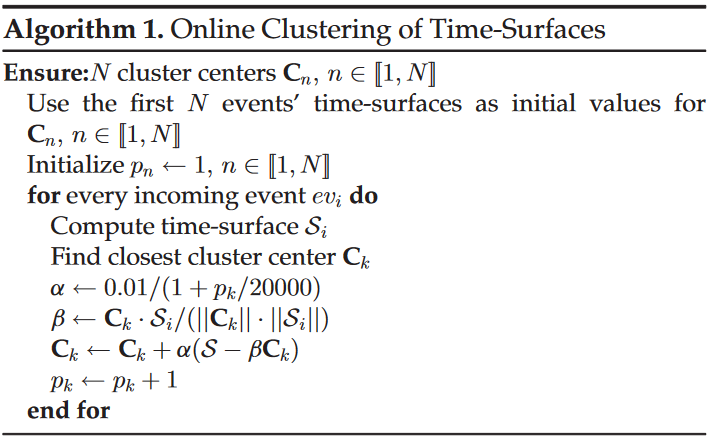
[1] LAGORCE X, ORCHARD G, GALLUPPI F, 等. HOTS: A Hierarchy of Event-Based Time-Surfaces for Pattern Recognition[J/OL]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(7): 1346-1359. DOI:10.1109/TPAMI.2016.2574707.
速度不变的 Time-Surface[2]
A common representation used in event-based vision is the Surface of Active Events [7], also referred as Time Surface [30]. The Time Surface T at a pixel (x, y) and polarity p is defined as T (x, y, p) ← t, (2) where t is the time of the last event with polarity p occurred at pixel (x, y).
Time-Surface 的局部可能有很大的变化。事实上,根据速度、方向和拐角的对比度,Time-Surface 的可能会有很大变化。为了保持分类模型的紧凑和高效,对其输入引入一些归一化非常重要。
为了角点检测角点,应当使用相对时间而不是绝对的时间戳.然而在每个事件发生时更新一次局部的 Time-Surface 太过于昂贵,而且存储每个像素的多个时间戳,消耗资源. 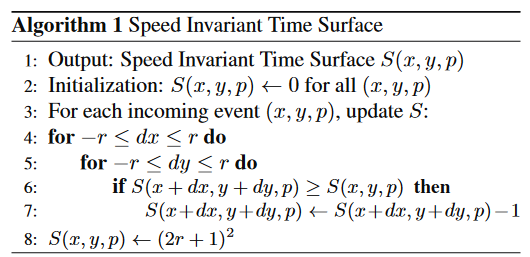
若周围更高,则把S(x,y,p)周围的都削一圈,把S(x,y,p)赋值为(2r+1)^2(那就是把(2r+1)^2减1?)
[2]MANDERSCHEID J, SIRONI A, BOURDIS N. Speed Invariant Time Surface for Learning to Detect Corner Points With Event-Based Cameras[C/OL]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, CA, USA: IEEE, 2019: 10237-10246[2023-10-10]. https://ieeexplore.ieee.org/document/8954376/. DOI:10.1109/CVPR.2019.01049.