Introduction
RPG_EMVS is the implementation of EMVS: Event-based Multi-View Stereo. A 3D Reconstruction with an Event Camera in Real-Time.
Installation
Clone the responsity
1
| cd home\yousa\rosCatkinBuild\src
|
1
| git clone git@github.com:uzh-rpg/rpg_emvs.git
|
Run sample
1
2
3
4
5
| cd home\yousa\rosCatkinBuild\src\ros_emvc
mkdir sample && cd sample
source /home/yousa/rosCatkinBuild/devel/setup.zsh
rosrun mapper_emvs run_emvs --bag_filename=/home/yousa/dataset/shapes_6dof.bag --flagfile=/home/yousa/rosCatkinBuild
/src/rpg_emvs/mapper_emvs/cfg/slider_depth.conf
|
Output in terminal:
1
2
3
4
5
6
7
8
9
10
| ~/rosCatkinBuild/src/rpg_emvs/sample master ?1 ❯ rosrun mapper_emvs run_emvs --bag_filename=/home/yousa/dataset/shapes_6dof.bag --flagfile=/home/yousa/rosCatkinBuild/src/rpg_emvs/mapper_emvs/cfg/slider_depth.conf
I0911 14:59:14.897390 3300 data_loading.cpp:62] initial stamp: 1468939993.067416019
I0911 14:59:14.956785 3300 depth_vector.hpp:133] Using linear spacing in inverse depth
I0911 14:59:14.956879 3300 mapper_emvs.cpp:183] Specified DSI FoV < 10 deg. Will use camera FoV instead.
I0911 14:59:14.956899 3300 mapper_emvs.cpp:191] Focal length of virtual camera: 168.629 pixels
I0911 14:59:15.124897 3300 main.cpp:91] Time to evaluate DSI: 112 milliseconds
I0911 14:59:15.124984 3300 main.cpp:92] Number of events processed: 478860 events
I0911 14:59:15.124994 3300 main.cpp:93] Number of events processed per second: 4.27554 Mev/s
I0911 14:59:15.125013 3300 main.cpp:95] Mean square = 634.101
I0911 14:59:15.157297 3300 main.cpp:142] Saved 1062 data points to pointcloud.pcd
|
In sample:
1
2
3
4
5
6
7
| └── sample
├── confidence_map.png
├── depth_colored.png
├── depth_map.png
├── dsi.npy
├── pointcloud.pcd
└── semidense_mask.png
|
Visualization
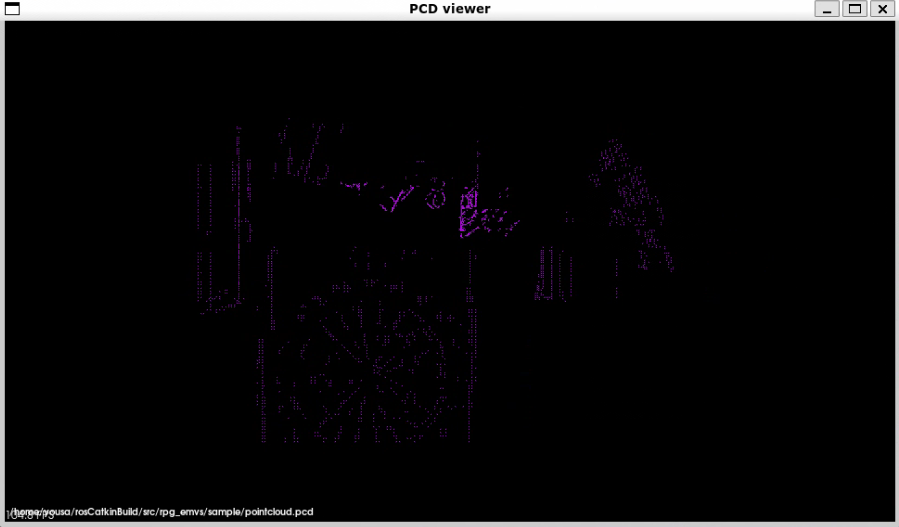
Point cloud
Original python script has bug in python3.X, so we use pcl-tools or open3D to visualize point cloud.
1
| sudo apt-get install pcl-tools
|
1
| pcl_viewer /home/yousa/rosCatkinBuild/src/rpg_emvs/sample/pointcloud.pcd
|
Notice it is upside down.
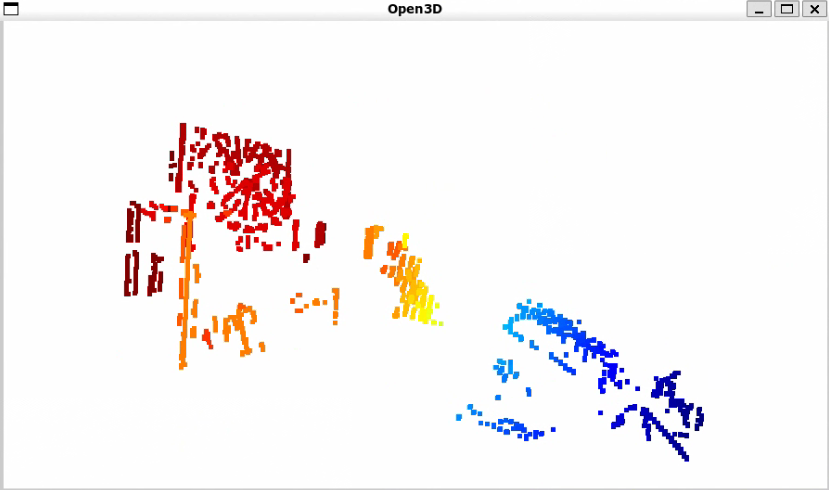
Open3D
1
2
3
4
5
6
| import open3d as o3d
import numpy as np
ply = o3d.io.read_point_cloud('/home/yousa/rosCatkinBuild/src/rpg_emvs/sample/pointcloud.pcd')
o3d.visualization.draw_geometries([ply])
|
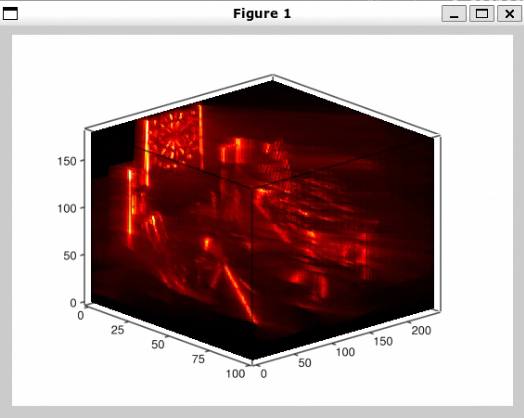
Disparity Space Image(DSI)
Install visvis
Visualize DSI
In visualize_dsi_volume.py in line 22, change t = vv.volshow(vol, renderStyle = 'mip') to t = vv.volshow3(vol, renderStyle = 'mip')
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| import numpy as np
import argparse
import visvis as vv
app = vv.use()
if __name__ == "__main__":
parser = argparse.ArgumentParser(description='Plot the disparity space image (DSI) using 3D slices')
parser.add_argument('-i', '--input', default='dsi.npy', type=str,
help='path to the NPY file containing the DSI (default: dsi.npy)')
args = parser.parse_args()
a = vv.gca()
a.daspect = 1, -1, 1
a.daspectAuto = True
vol = np.load(args.input)
# Reorder axis so that the Z axis points forward instead of up
vol = np.swapaxes(vol, 0, 1)
vol = np.flip(vol, axis=0)
# t = vv.volshow(vol, renderStyle = 'mip')
t = vv.volshow3(vol, renderStyle = 'mip')
t.colormap = vv.CM_HOT
app.Run()
|
1
| python3 /home/yousa/rosCatkinBuild/src/rpg_emvs/mapper_emvs/scripts/visualize_dsi_volume.py -i /home/yousa/rosCatkinBuild/src/rpg_emvs/sample/dsi.npy
|
1
| python3 /home/yousa/rosCatkinBuild/src/rpg_emvs/mapper_emvs/scripts/visualize_dsi_slices.py -i /home/yousa/rosCatkinBuild/src/rpg_emvs/sample/dsi.npy
|